(Содержание и структура главы в основном
аналогичны одноименной главе в учебниках по спортивной борьбе под ред.
Г. С. Туманяна (1997; 1998), поскольку материалы, касающиеся
непосредственно биомеханики спортивной борьбы, подготовлены Ю. А.
Шуликой.)
3.1. Понятийный аппарат
Для того, чтобы оценить отдельные движения или
сопоставить их между собой, определяют их биомеханические
характеристики, которые делятся на две группы: качественные
(напряженность, расслабленность, свобода, легкость, выразительность и
др.) и количественные (кинематические, динамические и статические).
Характеристики движений во многом зависят от двигательных возможностей
спортсмена, под которыми понимаются предпосылки, сложившиеся в организме
в процессе развития (филогенеза и онтогенеза).
Тренер, учитывая реальные двигательные
возможности борцов, ставит перед ними те или иные двигательные задачи.
Это предполагает выполнение движений с заданными биомеханическими
характеристиками, стимулирующими активизацию мыслительной и двигательной
деятельности и в конечном итоге позволяющими достичь соответствующих
целей. Двигательная задача решается путем специально организованных
двигательных действий.
Техника спортивной борьбы – это система
соревновательных упражнений, основанная на рациональном использовании
координационных и кондиционных возможностей борцов и направленная на
достижение высоких спортивных результатов.
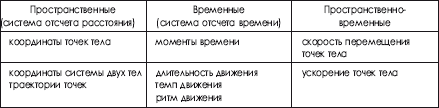
3.2. Количественные характеристики движений
В связи с тем, что в основе дзюдо лежит принцип
парирования атаки противника, биомеханические основы ударной техники в
настоящей главе описываться не будут.
Все двигательные действия в видах спортивной
борьбы могут быть описаны кинематическими характеристиками и
динамическими параметрами (схема 3.1, 3.2).
Схема 3.1
Кинематические составляющие движений
Поскольку основная задача в спортивной борьбе –
переведение тела сопротивляющегося противника из какого-либо исходного в
заданное правилами конечное положение (Ю. А. Шулика, 1988), то
первоосновой при организации целенаправленного движения является
формирование «модели потребного будущего» (Н. А. Бернштейн, 1991), что и
предопределяет доминирование кинематических параметров, влияющих на эту
модель.
Действительно, прежде чем проводить бросок или
переворот, необходимо учесть особенность взаимной позы, взаимного
захвата, с использованием которого можно будет обеспечить собственное
перемещение относительно противника, перемещение тела противника
совместно со своим телом.
Только определив эту модель и достигнув
определенной кинематической связи, можно реализовывать ее в динамическом
аспекте, используя силу своих мышц и инерционные факторы.
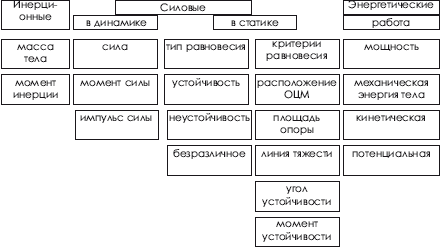
Схема 3.2.
Динамические составляющие движений
При изучении движений спортсмена тело его
условно принимают за материальную точку (это самая простая модель). Если
при анализе движений размерами тела пренебречь невозможно (поскольку
теряется смысл решаемой задачи), оно может быть рассмотрено (на
кинограмме) как система материальных точек. Допускается еще одно
упрощение: тело спортсмена условно считается абсолютно твердым, т. е.
формы и размеры его отдельных звеньев считаются неизменными при
движениях (расстояния между материальными точками каждого звена или
части тела постоянны).
Принимая различные положения, борцы, как правило, должны заботиться о сохранении или изменении равновесия своего тела и тела соперника. Для
принятия любого фиксированного положения борец должен обеспечить
необходимые условия взаимодействия своего тела с опорой (ковром),
соперником.
Существуют три вида равновесия тела: устойчивое,
неустойчивое и безразличное. Во время схватки соперники почти никогда
не находятся в положении безразличного равновесия, довольно редко – в
устойчивом, чаще всего – в неустойчивом. Это требует больших мышечных
усилий и значительного расхода энергетических ресурсов. Напряжение
мышечной системы тем больше, чем более неустойчиво положение борца.
Биомеханическим критерием степени устойчивости тела является место
расположения его общего центра масс (ОЦМ), причем любые, даже
малозначительные смещения ОЦМ относительно опоры изменяют устойчивость.
3.3. Положение тела борца и сохранение равновесия
Какое бы двигательное действие ни совершал
человек, он должен придать своему телу определенное положение в
пространстве. Сохранение неподвижного положения тела и отдельных его
частей осуществляется благодаря статическому напряжению мышц.
Необходимость выделения фактора положения тела
объясняется его большим значением в технике физических упражнений.
Различают исходные, промежуточные, конечные положения тела.
Исходные положения принимают для создания
наиболее выгодных условий для начала последующих движений, лучшей
ориентировки в окружающей обстановке, сохранения устойчивости,
обеспечения свободы движений, соответствующего воздействия на
определенные органы и системы организма.
Борец меняет положение тела, с тем чтобы
повысить свою устойчивость, обеспечить максимальное приложение усилия к
противнику. Исходные позы в этом случае характеризуют готовность к
решению предстоящей двигательной задачи. Их можно отнести к тем
состояниям, которые академик А. А. Ухтомский назвал «оперативным
покоем». Хотя в них нет внешних движений, но нигде так ярко не
проявляется единство концентрированной целеустремленности организма, как
в этих исходных позах.
Важную роль в обеспечении атакующих и защитных
действий играет возможность свободно перемещаться по татами, свободно
двигать туловищем.
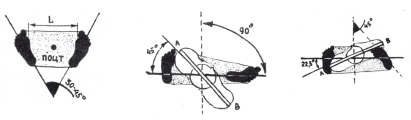
Для этого необходимо знать некоторые закономерности, связанные с расположением стоп и плечевой оси борца.
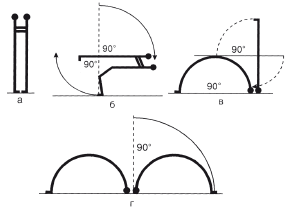
Так, если одна стопа борца будет развернута
относительно другой на 90 градусов, то его плечевая ось для сохранения
равновесия должна развернуться в эту сторону на 45 градусов (рис. 3.1б).
Если одна стопа развернется внутрь на 45 градусов, то для сохранения
равновесия необходимо развернуть плечевую ось в эту же сторону на 22,5
градуса (рис. 3.1в).
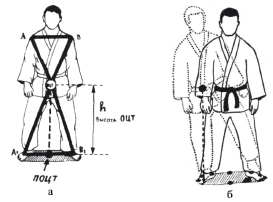
3.1а – стопы размещены симметрично
3.1б – одна стопа развернута на 90 градусов наружу
3.1в – одна стопа развернута на 45 градусов внутрь
Рис. 3.1. Влияние направления стоп на смещение плечевой оси борца
Однако не только расположением ОЦМ определяется
степень устойчивости тела борца. Не менее важным критерием устойчивости
является величина площади опоры тела. Степень устойчивости тела прямо
пропорциональна площади его опоры. Следовательно, борец должен
стремиться к увеличению площади опоры (до определенной степени) и
снижению высоты расположения над ней ОЦМ.
На рис. 3.2а показано расположение общего
центра тяжести и его проекции на горизонтальную плоскость, а также линия
плеч и ее проекция на площадь опоры (ОЦТ).
Согнутые ноги или расширение площади опоры
уменьшают высоту (h) расположения ОЦТ и увеличивают устойчивость. Однако
следует иметь в виду, что избыточное расширение точек опоры может
привести к эффекту их скольжения и потере равновесия.
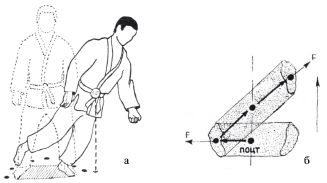
При перемещении проекции ОЦТ в пределах площади
опоры сохраняется лабильное равновесие (рис. 3.2б). Чем ближе проекция
ОЦТ будет расположена к центру площади опоры, тем устойчивее будет
равновесие.
В случае потери устойчивого статического
равновесия (рис. 3.3а), его можно сохранить динамически. Для этого опора
борца, расположенная ближе к проекции ОЦТ, выставляется в сторону
предполагаемого падения. Так, на рис. 3.3б показано перемещение опоры в
случае выведения борца из равновесия вперед и вправо.
Рис. 3.2. Условия для сохранения устойчивого равновесия
Рис. 3.3. Нарушение равновесия и его динамическое восстановление
Сохранить равновесие можно за счет повисания на
противнике и перераспределения части своего веса на площадь его опоры. В
этом случае формируется общий центр тяжести борющейся пары и проекция
общего центра тяжести борющейся пары.
Для более объективной оценки степени
устойчивости тела необходимо учитывать величину угла устойчивости –
угла, заключенного между линией действия силы тяжести и наклонной
линией, проведенной из ОЦМ к любой точке границы площади опоры. Величина
угла устойчивости зависит не только от величины площади опоры, но и от
высоты расположения ОЦМ над ней. Так, при одной и той же площади опоры
угол устойчивости тела борца будет тем больше, чем ближе к площади опоры
располагается ОЦМ. Быстрота смены угла устойчивости зависит от
конкретных условий и позволяет опытному борцу своевременно принять
наиболее устойчивое положение и тем самым обеспечить проведение приема.
Определение так называемого момента
устойчивости (М) помогает получить интегральную оценку степени
устойчивости борца, принявшего конкретную позу. М равен произведению
силы тяжести тела на плечо в области площади опоры и определяется
произведением массы тела борца на длину перпендикуляра, проведенного от
границы площади опоры к линии тяжести. М зависит от двух величин: массы
борца и площади опоры. Площадь опоры тела борца редко принимает
очертания фигуры правильной формы, и, естественно, линия тяжести почти
никогда не пересекает ее по центру. Регулируя относительную подвижность
сегментов тела мощной мускулатурой, можно оказывать значительное влияние
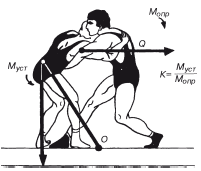
на степень устойчивости тела. Сила борца, стремящегося вывести
соперника из равновесия, действует на его тело и образует так называемый
опрокидывающий момент (М) – момент силы относительно оси вращения. Для
сохранения равновесия необходимо, чтобы М был больше М Этого можно
достичь, приняв соответствующую позу, увеличив площадь опоры, приблизив к
ней ОЦМ тела и напрягая большие группы мышц (рис. 3.4).
Отношение М к М называется коэффициентом
устойчивости (К): К = М /М При К > 1 тело сохраняет равновесие; если К
= 1, оно принимает крайнее положение; когда К < 1, тело теряет
равновесие.
Рис. 3.4. Коэффициент устойчивости, равный
соотношению момента устойчивости (М) защищающегося борца и
опрокидывающего момента (М) атакующего борца (Q – сила действия
атакующего)
При выполнении движений без изменения места на
ковре ОЦМ тела может перемещаться в горизонтальной и вертикальной
плоскостях. В первом случае одновременно перемещается проекция ОЦМ на
площадь опоры, что создает угрозу потери равновесия тела. Избегая этого,
борец вынужден совершать так называемые компенсаторные движения
(дополнительные или сопутствующие основному движению). Обычно они
выполняются при малой площади опоры, удержании соперника, защитных
действиях и отрыве соперника от ковра. Часто эти движения требуют
значительного напряжения многих групп мышц. В основе механики
компенсаторных движений лежат закономерности проявления третьего закона
динамики, в соответствии с которым при взаимодействии тела борца с
опорой (ковром), соперником и частями его тела действие силы всегда
вызывает одинаковое по величине и противоположное по направлению
противодействие. Благодаря компенсаторным движениям создается
своеобразный баланс сил взаимодействия (действия и противодействия), и
спортсмену удается сохранить равновесие. При выполнении компенсаторных
движений наибольшая нагрузка приходится на суставы и группы мышц, ближе
других расположенных к опоре. Например, при борьбе в стойке наибольшая
нагрузка приходится на суставы и мышцы стоп и коленных суставов.
Если борец находится в относительно неподвижном
положении (в любой стойке), давление тела на опору равно его весу.
Когда он начнет резко перемещать ОЦМ тела вниз, двигаясь с ускорением
(при некоторых атакующих действиях), силы инерции масс отдельных звеньев
тела будут направлены вверх. В этом случае давление тела (сила тяжести)
на опору меньше, чем его вес (на величину, равную силе инерции звеньев
тела). При перемещении ОЦМ тела вверх (например, при ускоренном
разгибании в коленных, тазобедренных и других суставах во время резкого
вставания, подпрыгивания вверх, поднимания соперника и т. д.) давление
тела борца на опору складывается из веса тела и силы инерции частей
тела, направленных вниз, т. е. в сторону, противоположную движению всего
тела.
При равномерном движении ОЦМ тела (без
ускорения) в вертикальной плоскости давление на опору равно весу тела.
Практически такое движение ОЦМ тела в борьбе не встречается, так как
почти все действия выполняются с ускорением звеньев тела, что можно
проверить на обычных пружинных весах (в положении стоя весы будут
показывать массу борца; во время резкого вставания показатель на весах
увеличится за счет силы тяжести).
Выполняя технические действия, связанные с
активными широкоамплитудными перемещениями, каждый борец должен
руководствоваться биомеханическими закономерностями, позволяющими ему
наиболее эффективно использовать индивидуальные возможности и другие
факторы, к которым относятся прежде всего внешние силы тяжести, реакции
опоры, инерции, сопротивления соперника и др. Активная борьба возможна
только в том случае, если спортсмен способен при помощи внутренних сил
(силы собственных мышц) активно преодолевать внешние силы.
Особенности техники борьбы определяются способностью спортсмена освоить биомеханические закономерности движений.
Использовать их – значит добиться большого
преимущества над соперником при проведении различных бросков и других
основных и вспомогательных технических действий. В обманных действиях
спортсмен ложным движением вызывает ответное действие соперника, масса
тела которого начинает движение в определенном направлении с такой
скоростью, что для изменения направления движения требуются время и
чрезмерные, иногда недоступные спортсмену усилия. Быстрым и ловким
движением, правильным выбором места приложения к телу соперника
собственных сил атакующий спортсмен увеличивает скорость уже не
управляемого движения обманутого соперника, чем и выводит его из
равновесия. Иногда инерцию движения соперника атакующий борец выгодно
использует при борьбе в стойке, выполняя разнообразные заведения,
осаживания, толчки, рывки. Когда соперник вольно или невольно
перемещается по ковру, атакующий борец резким движением сковывает
движения его ног. Туловище соперника продолжает двигаться по инерции,
компенсаторные движения он выполнить не может, в результате чего, теряя
равновесие, падает.
Количественная связь между силами, приложенными
к телу спортсмена, и изменением скорости его движения определяется
вторым законом динамики: изменение скорости движения (ускорение) прямо
пропорционально приложенной силе и обратно пропорционально массе тела.
Чтобы придать ускорение движению своего тела или телу соперника, борец
должен развить большую силу. Конечный эффект движения будет зависеть от
массы того тела, к которому приложена сила.
В качестве примера эффективности использования
знаний законов биомеханики при прогнозировании возможностей противника
можно привести анализ возможностей сохранения противником статического
(противонаправленного) равновесия. Если у противника длина стопы
относительно длиннее обычного, то он обладает повышенным качеством
статической устойчивости при перемещении его вперед, и для его
опрокидывания следует использовать броски с вертикальным отрывом от
ковра.
Если у противника пяточная кость слишком
выдается назад, то он устойчив к выведению из равновесия назад, и в этом
случае необходимо прикладывать усилие к нижним конечностям как можно
ниже.
Если у противника при относительно небольшой
двуглавой мышце, сухожилие прикреплено к кости предплечья на сантиметр
ниже обычного, то ее сила может быть на порядок выше обычной и т. д.
3.4. Двигательные задачи и способы их решения
Все движения борцов выполняются:
• в условиях непосредственного контакта на различных дистанциях;
• с постоянной сменой взаиморасположений, взаимозахватов, взаимоупоров;
• с варьирующими по ритму и величине взаимными усилиями.
Вследствие многообразия техники и тактики
борьбы прогнозировать условия противоборства трудно. В любом временном
отрезке схватки соперники могут иметь различные целевые установки,
предопределяющие выбор и применение конкретных технических элементов,
технических и тактических действий и т. п. Основной целью поединка
борцов с позиций биомеханики являются:
• перемещение сопротивляющегося соперника из одного какого-либо положения в другое, поощряемое правилами соревнований;
• удержание соперника в определенном оцениваемом судьями положении.
Если учтены все биомеханические закономерности
спортивной борьбы, эти целевые установки схватки осуществляются
экономично и эффективно. Борцы решают определенные задачи с помощью
чрезвычайно сложных движений. Сложность приемов борьбы во многом зависит
от особенностей кинематических цепей, образованных обоюдным захватом, и
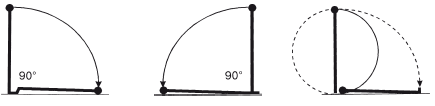
помех со стороны соперника. Атакующий борец, если рассматривать его
движения в сагиттальной плоскости (сбоку), может бросить соперника
вперед на грудь (рис. 3.5) и назад на спину (рис. 3.6), повернув его
тело вокруг поперечной оси на 90°. В первом случае (см. рис. 3.5) бросок
оценивается невысокими баллами, во втором (см. рис. 3.6) – высокими.
Чтобы соперник упал вперед на спину, необходимо повернуть его тело
вокруг поперечной оси на 270° (рис. 3.7).
Рис. 3.5. Опрокидывание вперед на грудь.
Рис. 3.6. Опрокидывание назад на спину
Рис. 3.7. Опрокидывание вперед на спину
Для этого атакующий в случае расположения
грудью к груди соперника должен в броске назад, прогибаясь, описать дугу
в 180° (рис. 3.8). В этом случае он перебросит соперника через мост, а
соперник, описав вокруг поперечной оси дугу в 270°, окажется на спине
или на мосту. Этого же можно добиться, если предварительно повернуться к
сопернику спиной и, сгибаясь вперед и падая, увлечь его за собой
(рис. 3.9).
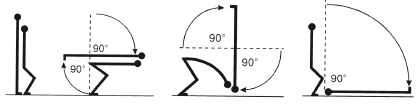
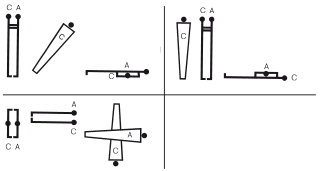
В основном броски вперед проводятся не в одной,
а в трех плоскостях. Так, можно повернуться не на 180°, а на 90° и в то
же время вместе с соперником совершить поворот вокруг своей продольной
оси на 180° (рис. 3.10). Чтобы опрокинуть соперника назад на спину,
атакующему в одном случае достаточно наклониться вместе с ним вперед, в
другом – зайдя за соперника, прогнуться назад вместе с ним.
Рис. 3.8. Опрокидывание вперед на спину, прогибаясь
Рис. 3.9. Опрокидывание вперед на спину, повернувшись спиной к противнику и наклоняясь вперед
При переворотах соперника в партере решают те
же двигательные задачи, но используя с меньшей длиной плеч рычаги,
следовательно, прилагая большие усилия.
При дожимании соперника на мосту, удержании и
болевых приемах необходимо приложить усилие к телу соперника в таком
месте и таким образом, чтобы максимально использовать возможности
рычагов.
При бросках часто бывает необходимо выполнить
предварительный вертикальный отрыв соперника от ковра, что возможно при
условии подведения своего центра тяжести под центр тяжести соперника.
Чтобы переместить соперника (после отрыва) в горизонтальное положение, к
его телу должна быть приложена пара разнонаправленных сил, что создаст
момент вращения.
Рис. 3.10. Ортогональная проекция
опрокидывания, прогибаясь, с одновременным поворотом вокруг продольной
оси (А – атакующий, С – противник)
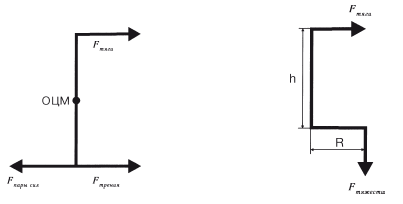
При выведении соперника из равновесия (без
предварительного отрыва от ковра) необходимо приложить к верхней точке
его тела силу, которая окажется верхней составляющей пары сил. В этот
момент ОЦМ тела станет осью вращения. Если предположить, что
опрокидываемое тело жесткое, возникает нижняя, направленная
противоположно составляющая пары сил. Поэтому ОЦМ будет приобретать
определенное ускорение и окажется в месте соприкосновения с опорой
(рис. 3.11).
Рис. 3.11. Условия, обеспечивающие выведение тела из равновесия без отрыва от опоры
Рис. 3.12. Условия, определяющие возможность опрокидывания (R – плечо силы тяги, h – плечо силы тяжести) |